Autonomous Car Racing
Exploring neural networks with Java
Posted: June 14, 2020
I programmed a self-driving car using a neural network in Java for a school project. We used The Open Racing Car Simulator (TORCS), which is a racing game that is often used as a platform to create self-driving cars. The TORCS source code is open source, which gives developers the ability to create their own cars and drivers. The self-created drivers can compete in races against TORCS-made drivers, or even other clients. A server is required in order for a machine to connect with the game.
Neural Network
The artificial neural network used to control the car is a feedforward neural network that uses resilient backpropagation as an optimization function. The realized program uses the Java Encog library by Jeff Heaton to create and manage the neural network. The Encog library implements different types of neural networks, activation functions, and training techniques that are required in this project.
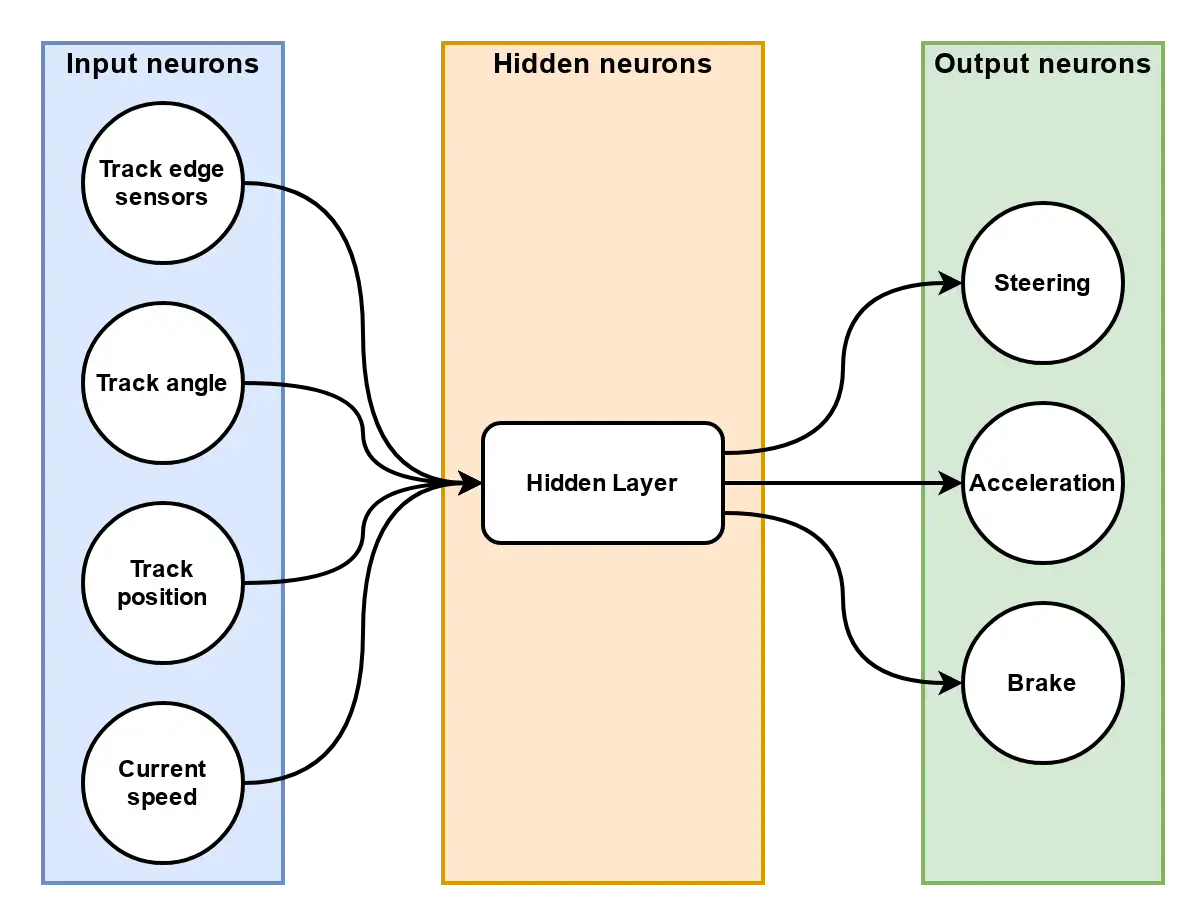
The network consists of twenty-two input neurons, these take floating point input values ranging from 0.0 to 1.0. These input neurons are connected to a hidden layer with certain weights, this hidden layer consists of nineteen neurons that will ‘fire’ a value ranging from -1.0 to 1.0 to the three output neurons.
The last three neurons decide and control the car’s actions;
- Steering
- Accelerating
- Braking
Demonstration
Track Results
| Track | Laps | Time (m:s:ms) | Top speed (km/h) |
|---|---|---|---|
| Alpine 1 | 2 | 05:34:580 | 241 |
| Alpine 2 | 1 | 02:54:160 | 217 |
| F-speedway | 3 | 02:29:860 | 290 |